Ile-iṣẹ adaṣe jẹ bakannaa pẹlu ĭdàsĭlẹ, nbeere pipe ailopin, iyara, ati igbẹkẹle ninu iṣelọpọ paati. Lara awọn ẹya ara ẹrọ adaṣe to ṣe pataki, awọn eto eefi — ni pataki awọn paipu eefin — ṣe ipa pataki ninu iṣẹ ṣiṣe ọkọ, iṣakoso itujade, ati idinku ariwo. Bii awọn aṣelọpọ ṣe n tiraka lati pade awọn iṣedede didara lile ati awọn ibi-afẹde iṣelọpọ, awọn roboti alurinmorin ti farahan bi awọn irinṣẹ pataki ni iṣelọpọ awọn eto eefi. Nkan yii ṣawari bii awọn eto alurinmorin roboti, ṣepọ pẹlu ohun elo ipo ilọsiwaju biiRotari tẹ positionersatiadani amuse, ti wa ni revolutionizing isejade ti Oko eefi pipes, igbega ṣiṣe, aitasera, ati ọja didara si mura awọn ipele.
1. Awọn eka ti eefi Pipe Manufacturing
Awọn paipu eefin ti wa labẹ awọn ipo to gaju, pẹlu awọn iwọn otutu giga, awọn gaasi ibajẹ, ati awọn gbigbọn ẹrọ. Lati koju awọn italaya wọnyi, wọn jẹ iṣelọpọ deede lati irin alagbara tabi irin aluminiomu ati pe o nilo ailẹgbẹ, awọn alurinmu airtight kọja awọn geometries eka. Awọn ilana alurinmorin afọwọṣe ti aṣa nigbagbogbo n tiraka lati ṣetọju aitasera ni iru awọn ohun elo, ti o yori si awọn abawọn bii porosity, idapọ ti ko pe, tabi ipalọlọ.
Awọn roboti alurinmorin, sibẹsibẹ, tayọ ni mimu awọn idiju wọnyi mu. Ni ipese pẹlu isọsọ-ọna-ọpọlọpọ ati mimuuṣiṣẹpọ pẹlu awọn eto aye ti konge, wọn fi awọn welds ti ko ni abawọn sori awọn aaye ti o tẹ, awọn flanges, ati awọn isẹpo — ṣe pataki fun idaniloju iduroṣinṣin eto eefi.
2. Robotic Welding ni Ise: Awọn ohun elo bọtini fun Awọn paipu eefin
2.1 Tube-to-Flange ati Tube-to-Muffler Welding
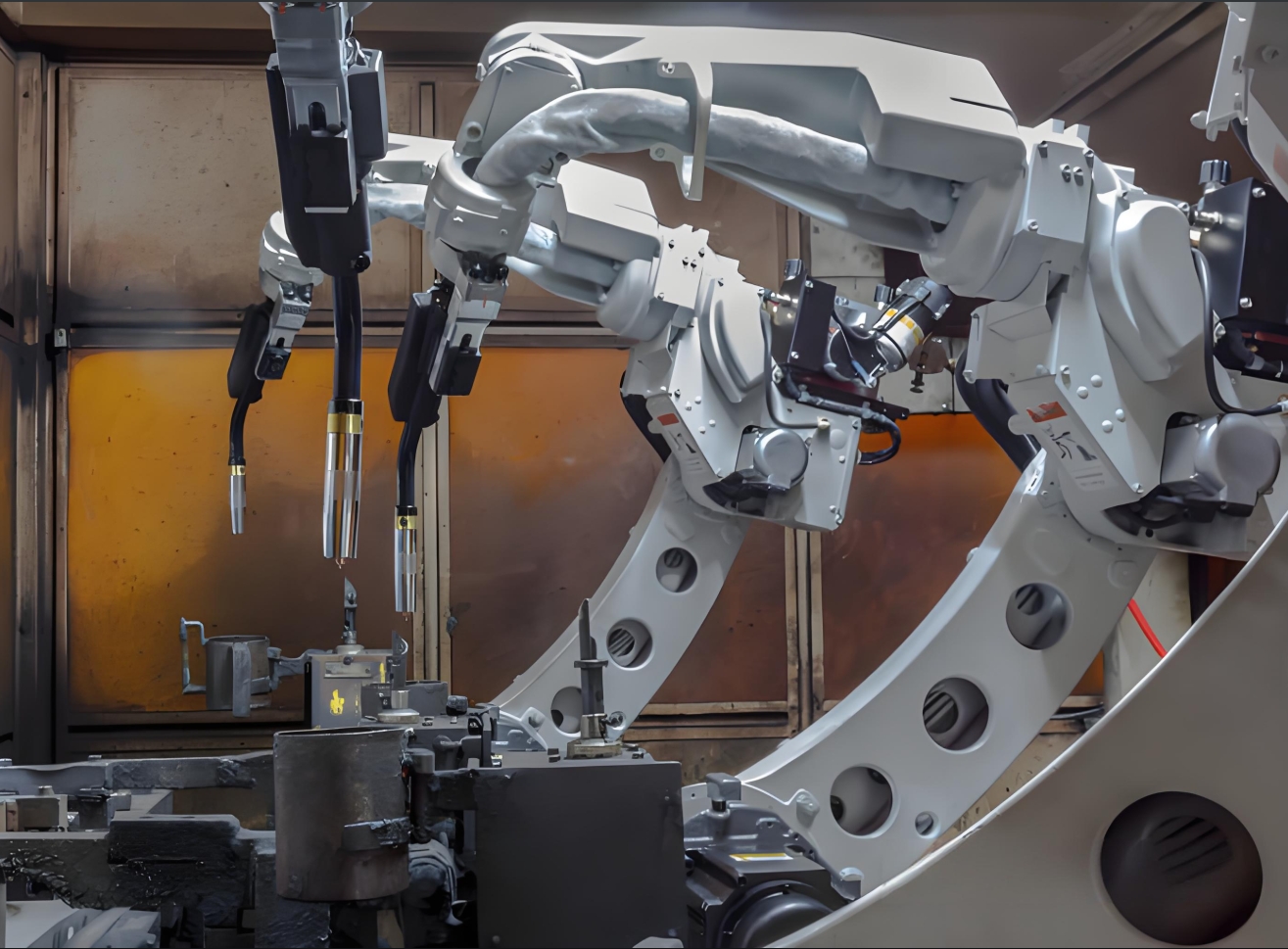
Awọn eto eefi ni awọn paati lọpọlọpọ, pẹlu awọn paipu, awọn oluyipada katalitiki, awọn atuntẹ, ati awọn mufflers. Awọn ọna alurinmorin roboti ṣe adaṣe adaṣe idapọ ti awọn tubes si awọn flanges tabi awọn ile muffler, ni idaniloju ilaluja aṣọ ati idinku awọn agbegbe ti o kan ooru (HAZ). Fun apẹẹrẹ, a6-axis articulated robotle ọgbọn ni ayika paipu ká ayipo, mimu ti aipe ògùṣọ igun ati irin-ajo iyara ani lori contoured roboto.
2.2 Lesa Alurinmorin fun Tinrin-Odi irinše
Awọn paipu eefin ode oni nigbagbogbo n ṣe awọn apẹrẹ olodi tinrin lati dinku iwuwo lakoko mimu agbara mu. Awọn roboti alurinmorin lesa, pẹlu iwuwo agbara giga wọn ati awọn okun weld dín, ṣe idiwọ ijagun ati ṣetọju awọn ohun-ini ohun elo. Eyi jẹ anfani ni pataki fun awọn eto eefin irin alagbara, nibiti konge jẹ pataki julọ.
2.3 Olona-Pass Welding fun Nipọn isẹpo
Fun awọn eto eefi ti o wuwo ni awọn ọkọ ayọkẹlẹ ti iṣowo, awọn ọna ẹrọ gaasi irin arc alurinmorin (GMAW) ṣiṣẹ awọn alurinmorin-ọpọlọpọ lati kọ awọn isẹpo to lagbara laarin awọn paipu ti o nipọn ati awọn biraketi. Awọn algoridimu alurinmorin adaṣe ṣatunṣe awọn paramita ni akoko gidi lati gba awọn iyatọ ohun elo.
3. Imudara irọrun pẹlu Awọn ipo Tilt Rotari
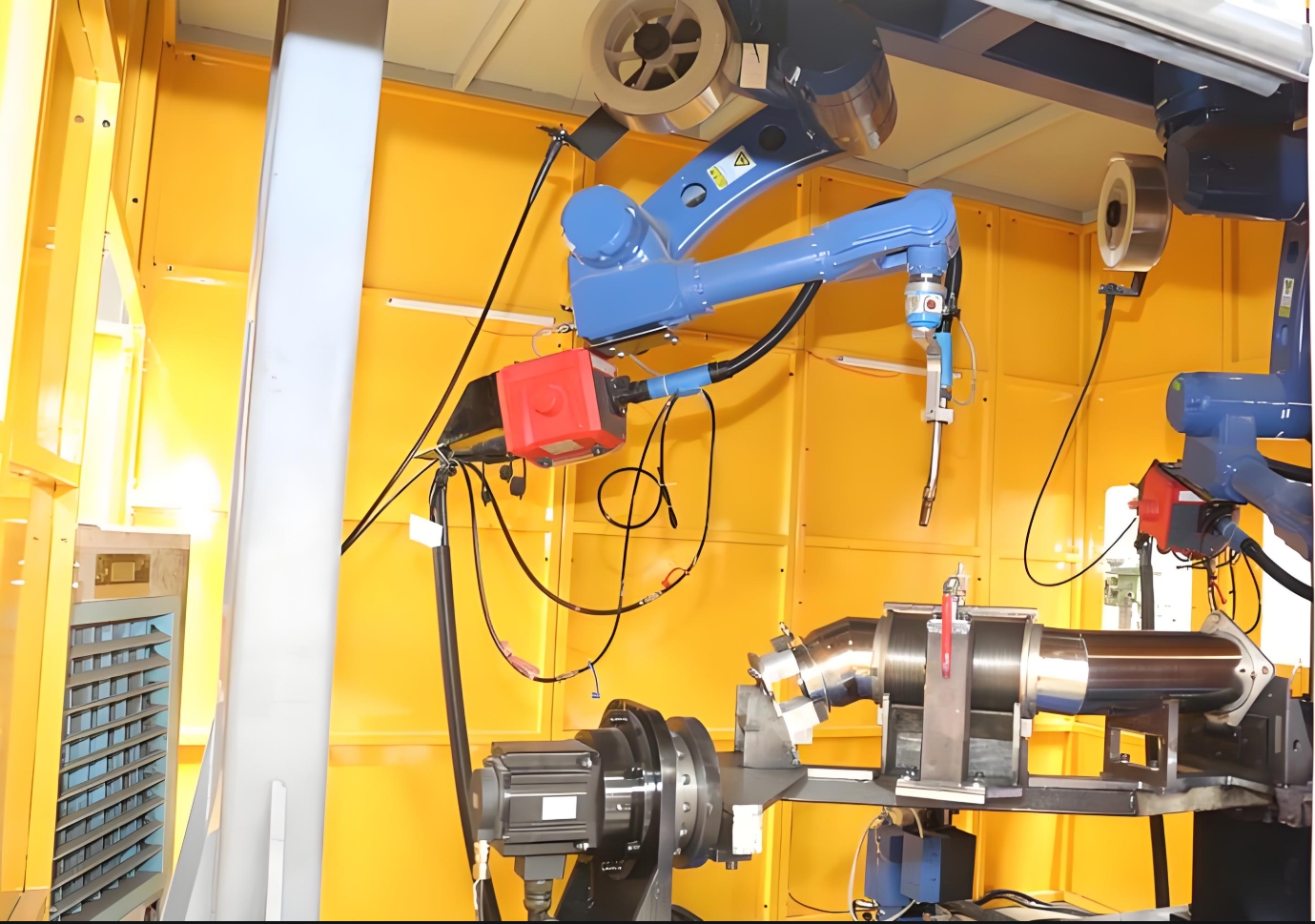
Aṣeṣe cell alurinmorin roboti kan da lori isọdọkan lainidi laarin roboti ati iṣẹ-ṣiṣe.Rotari tẹ positionersjẹ pataki ninu ilana yii, ti o nmu iyipo iwọn 360 ati titẹ awọn paipu eefi lakoko alurinmorin. Awọn anfani pẹlu:
- Ti o dara ju Wiwọle Apapọ: Awọn positioner reorients paipu lati mu awọn weld pelu ni alapin tabi petele ipo, simplifying robot siseto ati atehinwa ọmọ igba.
- Dinku Atunṣe: Nipa ṣiṣatunṣe iwọntunwọnsi iṣẹ-ṣiṣe, robot le pari ọpọlọpọ awọn welds ni iṣeto ẹyọkan, dinku akoko aiṣiṣẹ.
- Ilọsiwaju Ergonomics: Awọn oniṣẹ fifuye / unload irinše nigba ti robot welds, maximizing losi.
Fun apẹẹrẹ, ipo iduro meji-meji ngbanilaaye paipu kan lati ṣe alurinmorin nigba ti atẹle ti wa ni kojọpọ, ṣiṣe aṣeyọri isunmọ-tẹsiwaju.
4. Imuduro Itọkasi: Ẹyin ti Aitasera
Adanialurinmorin amusejẹ pataki fun idaduro awọn paati eefi ni titete deede lakoko alurinmorin roboti. Awọn ero apẹrẹ pataki pẹlu:
- Awọn ilana clamping: Pneumatic tabi hydraulic clamps ni aabo paipu, flanges, ati biraketi lai marring roboto.
- Modularity: Awọn ohun elo iyipada ni kiakia gba awọn iwọn ila opin paipu ti o yatọ tabi awọn atunto, ti o dara julọ fun iṣelọpọ awoṣe-dapọ.
- Gbona Management: Awọn ohun elo ti a ṣe lati awọn ohun elo ti o ni ooru ti o duro fun igba pipẹ si awọn arcs alurinmorin.
Awọn imuduro to ti ni ilọsiwaju ṣepọ awọn sensosi lati mọ daju ipo paati ṣaaju ibẹrẹ alurinmorin, imukuro awọn abawọn aiṣedeede.
5. Iṣiro Ṣiṣe Awọn anfani
Gbigba awọn eto alurinmorin roboti ni iṣelọpọ paipu eefin n pese awọn ilọsiwaju wiwọn:
- Idinku Time ọmọ: Apọju MIG roboti le pari weld oniyipo ni iṣẹju-aaya 60, ni akawe si awọn aaya 180+ fun alurinmorin afọwọṣe.
- Akoko ti o ga julọ: Awọn roboti ṣiṣẹ 24/7 pẹlu akoko isunmi ti o kere ju, ti n ṣe alekun iṣelọpọ lododun nipasẹ 30–50%.
- Awọn ifowopamọ ohun elo: Iṣakoso paramita deede dinku spatter ati atunṣe, dinku awọn idiyele agbara nipasẹ 15-20%.
Fun apẹẹrẹ, olutaja ọkọ ayọkẹlẹ Tier-1 kan royin a40% ilosoke ninu losilẹhin imuṣiṣẹ awọn sẹẹli roboti pẹlu awọn ipo amuṣiṣẹpọ fun apejọ eefi.
6. Igbega Didara si Awọn Ilana Ọkọ ayọkẹlẹ
Alurinmorin Robotik ṣe idaniloju ibamu pẹlu awọn ipilẹ didara adaṣe bii IATF 16949:
- Atunṣe: Awọn roboti ṣe atunṣe awọn ọna weld pẹlu deede ± 0.1 mm, imukuro iyipada eniyan.
- Iwari abawọn: Awọn eto iran ti a ṣepọ tabi awọn sensọ ibojuwo arc ṣe awari awọn aiṣedeede aarin ilana, nfa awọn atunṣe lẹsẹkẹsẹ.
- Awọn iwe aṣẹAwọn ọna ṣiṣe adaṣe ṣe ina awọn akọọlẹ weld traceable, pataki fun awọn iṣayẹwo ati awọn iranti.
Awọn ayewo lẹhin-weld fihan pe awọn ọna ẹrọ roboti dinku porosity ati awọn oṣuwọn kiraki nipasẹ 90% ni akawe si awọn ọna afọwọṣe.
7. Iduroṣinṣin ati Awọn aṣa iwaju
Awọn olupilẹṣẹ adaṣe n ṣe pataki siwaju si iduroṣinṣin. Alurinmorin Robotik ṣe atilẹyin iyipada yii nipasẹ:
- Idinku Lilo Agbara: Imudara arc-lori akoko ati awọn ipa ọna išipopada iṣapeye lilo agbara kekere.
- Dinku Egbin: Ti o ga akọkọ-kọja ikore awọn ošuwọn din alokuirin.
- Ṣiṣẹ Lightweighting: Alurinmorin pipe ṣe iranlọwọ fun lilo awọn ohun elo to ti ni ilọsiwaju, awọn ohun elo tinrin laisi ibajẹ agbara.
Nwo iwaju,Awọn roboti alurinmorin ti AIyoo kọ ẹkọ ẹrọ lati mu awọn aye-ara-ara dara fun awọn ohun elo titun, lakokoawọn roboti ifowosowopo (awọn koboti)yoo ṣe iranlọwọ fun awọn oniṣẹ ni iṣelọpọ ipele kekere.

Ipari
Ni agbegbe ti o ga julọ ti iṣelọpọ ẹrọ eefi ọkọ ayọkẹlẹ, awọn roboti alurinmorin — ti a ṣe afikun nipasẹ awọn ipo oye ati awọn imuduro — ṣe aṣoju ipo giga ti imọ-ẹrọ pipe. Nipa adaṣe adaṣe awọn iṣẹ ṣiṣe alurinmorin eka, awọn ọna ṣiṣe n fun awọn aṣelọpọ ni agbara lati ṣaṣeyọri awọn akoko iyara yiyara, didara impeccable, ati iṣelọpọ iwọn. Bii awọn ilana itujade eefin ti n di lile ati awọn apẹrẹ ọkọ ti ndagba, imọ-ẹrọ alurinmorin roboti yoo jẹ okuta igun-ile ti imotuntun, wiwakọ ile-iṣẹ adaṣe si ijafafa, ọjọ iwaju mimọ.
Fun awọn aṣelọpọ roboti ile-iṣẹ, tẹnumọ awọn agbara wọnyi ni awọn ohun elo paipu eefin kii ṣe afihan imọ-ẹrọ imọ-ẹrọ nikan ṣugbọn tun gbe awọn ojutu wọn si bi awọn alabaṣiṣẹpọ pataki ni ilọsiwaju didara iṣelọpọ adaṣe.
Akoko ifiweranṣẹ: Mar-21-2025



