Alurinmorin Robotic Mig ---- Ojutu alurinmorin igi atupa
Atọka
1. Iṣẹ nkan alaye
2. Robotic alurinmorin Solusan Akopọ
3. Robotic alurinmorin Ilana Solusan
4. Robotic ojutu Equipment iṣeto ni
5. Iṣẹ akọkọ 6. Ifihan ti Awọn ohun elo
7. Fifi sori, Ifiranṣẹ ati Ikẹkọ
8. Ṣayẹwo ati Gbigba
9. Awọn ibeere Ayika
10. Atilẹyin ọja ati Lẹhin ti sale iṣẹ
11. Ifijiṣẹ So Iwe
Robotik alurinmorin elo Video
1, Workpiece Alaye
-Alurinmorin waya OpinФ1.2mm
-Alurinmorin ilana: gaasi idabobo alurinmorin / Mig alurinmorin
-Weld pelu iru: ila gbooro iru, Circle iru
-Gaasi idabobo:99% CO2
-Ọna Isẹ: Afowoyi ikojọpọ ati unloading, robot laifọwọyi alurinmorin
-Aṣiṣe ibamu:≤ 0.5mm
-Awo Cleaning :ti fadaka luster le ti wa ni ti ri ninu awọn weld atilaarin awọn ibiti o ti lemeji iga ti weld pelu ni ẹgbẹ mejeeji
2, Robotic alurinmorin ojutu Akopọ
Lati le mu ilọsiwaju iṣẹ ṣiṣẹ, ni ibamu si ipo gangan ti iṣẹ-ṣiṣe, ile-iṣẹ Honyen yoo pese eto iṣẹ-iṣẹ robot alurinmorin, eyiti o le paarọ rẹ pẹlu oriṣiriṣi irinṣẹ lati ni ibamu pẹlu awọn ọja oriṣiriṣi.Iṣiṣẹ naa jẹ ti awoṣe roboti: HY1006A-145 robot alurinmorin, orisun agbara alurinmorin, ògùṣọ alurinmorin pataki fun robot, Igbimọ iṣakoso itanna ati awọn bọtini , chiller omi itutu agbaiye, awọn ipo ibudo iṣẹ ilọpo meji, Awọn ohun elo irinṣẹ, odi aabo aabo (iyan) ati awọn miiran awọn ẹya ara.
3, Mig Welding roboti ise ifihan Layout
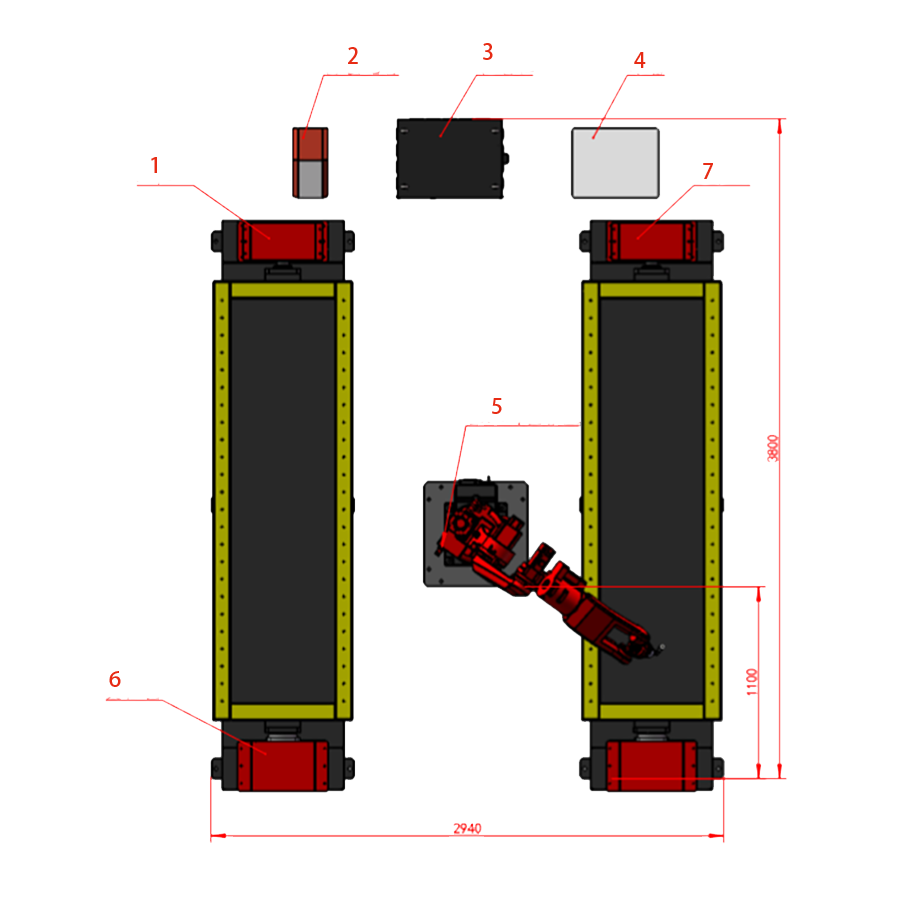
Honyen robot aaki alurinmorin ise Layout
1, Ibudo iṣẹ 1
2, Welding Power orisun
3, Robot adarí
4, Omi itutu agbaiye
5, Honyen aaki alurinmorin Robot, HY1006A-145
6, Olupo
7, Ibudo iṣẹ 2
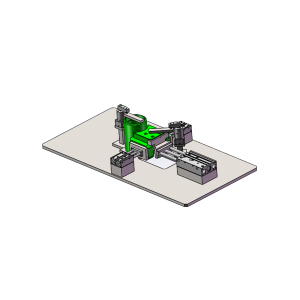
Electric polu awọn ẹya ara amuse
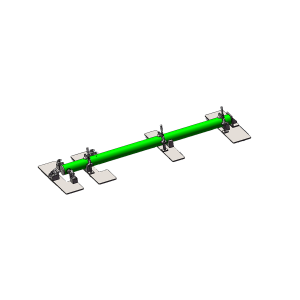
Awọn ẹya ara igi itanna 2
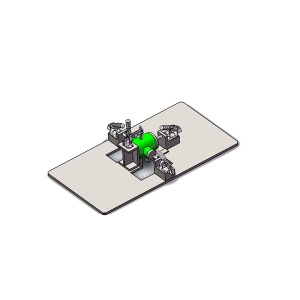
Awọn ojutu alurinmorin Robotic Ìfilélẹ 1
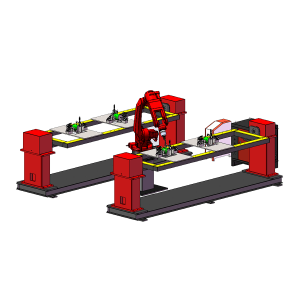
Awọn imuduro Awọn ẹya Ọpa Itanna 3
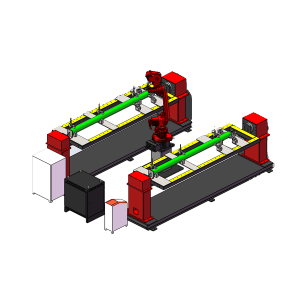
Awọn solusan alurinmorin Robotic Ìfilélẹ 2
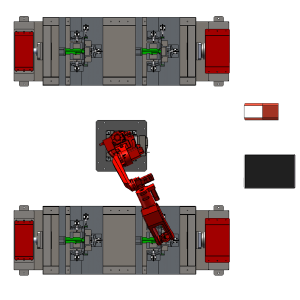
Awọn solusan alurinmorin Robotic Ìfilélẹ 3
4. Robotic alurinmorin Ilana Solusan I. Onišẹ èyà workpiece ni ibudo 1, Lẹhin ikojọpọ ati clamping o.Oniṣẹ n tẹ bọtini ibere ifiṣura roboti 1, ati robot bẹrẹ alurinmorin laifọwọyi;
II.Oniṣẹ lọ si ibudo 2 fun ikojọpọ workpiece.Lẹhin ikojọpọ workpiece, oniṣẹ presse robot ifiṣura ibere bọtini 2 ati ki o duro fun awọn robot finishing alurinmorin;
III.Lẹhin ti robot pari alurinmorin ni ibudo 1, o ṣe adaṣe eto ti ibudo 2;
Ⅳ.Lẹhinna Oniṣẹ ṣe ifilọlẹ Workpiece ni ibudo 1 ati fifuye iṣẹ iṣẹ tuntun kan;
V. ọmọ ni ọkọọkan.
5. Robotic ojutu Equipment iṣeto ni
| Nkan | Awoṣe | Opoiye | Brand | Awọn akiyesi | ||
| 1 | 1.1 | Robot ara | HY1006A-145 | 1 Ṣeto | Honyen | Pẹlu ara robot, minisita iṣakoso, oluṣeto ẹkọ |
| 1.2 | Robot Iṣakoso minisita | 1 ṣeto | ||||
| 1.3 | Alurinmorin agbara Orisun | 1 Ṣeto | Honyen | Megmeet alurinmorin | ||
| 1.4 | omi ojò | 1 Ṣeto | Honyen | |||
| 1.5 | Omi itutu alurinmorin Tọṣi | 1 Ṣeto | Honyen | |||
| 2 | 1 Axis positioner | HY4030 | 2 Ṣeto | Honyen | 2.5m, 300kg fifuye, 1.5KW ti won won o wu agbara | |
| 3 | Itanna Iṣakoso ibudo | 2 Ṣeto | Honyen | |||
| 4 | Apẹrẹ eto, iṣọpọ ati siseto | 1 Ṣeto | Honyen | |||
| 5 | odi odi | 1 Ṣeto | Honyen | iyan | ||
6. Akọkọ Išė Lati le rii daju didara alurinmorin ati ṣiṣe, eto roboti ti ni ipese pẹlu iṣẹ aabo ara ẹni pipe ati data data alurinmorin arc.Awọn iṣẹ akọkọ jẹ bi atẹle:
Tun bẹrẹ ọna atilẹba: nigba ti shield gaasi sisan jẹ ajeji, alurinmorin waya run ati igba die duro nigba alurinmorin, awọn pipaṣẹ ti "tesiwaju alurinmorin" le wa ni a npe ni taara lẹhin laasigbotitusita, ati robot le laifọwọyi tesiwaju alurinmorin lati eyikeyi ipo si awọn ti daduro ipo.
Wiwa aṣiṣe ati asọtẹlẹ: lẹhin ti itaniji ṣẹlẹ, Robot gba data lati ẹrọ iṣakoso, speculate ẹbi awọn ẹya ara, ki o si fun akojọ kan ti ga ẹbi awọn ẹya ara ni Tan, han awọn ọkọọkan ti irinše rirọpo ati okunfa lori kọmputa, eyi ti o le wa ni bojuwo lori ojula pẹlu pendanti ẹkọ.Ni afikun, kọnputa nigbagbogbo Gba data iṣẹ ṣiṣe lati ọdọ robot, ṣe itupalẹ data ti o gba, ṣe idajọ boya ipo iṣiṣẹ ti robot jẹ deede, ati ki o tọ olumulo lati koju aṣiṣe ti n bọ.
Anti-ijamba iṣẹ: nigbati ògùṣọ alurinmorin robot ṣe jamba pẹlu awọn nkan ita, ẹrọ ikọlu robot ṣiṣẹ lati daabobo Torch alurinmorin ati ara robot.
Iwé database: nipa eto awọn ipo alurinmorin to ṣe pataki ninu eto kan, eto yii le pari eto pipe ti okun weld laifọwọyi ati ṣatunṣe awọn aye alurinmorin ti o baamu.
Ẹkọ ati siseto: mọ siseto lori aaye nipasẹ pendanti ikọni.
Weave alurinmorin: nigba alurinmorin ilana, Robot ko le nikan mọ awọn wọpọ golifu alurinmorin iru ati Tun Z iru.Eyi ṣe iranlọwọ robot mọ iṣẹ alurinmorin golifu ti alabara ni ibamu si apẹrẹ nkan iṣẹ, nitorinaa lati mu iwọn okun weld pọ pẹlu agbara alurinmorin ati iṣẹ alurinmorin to dara.
Ifihan ipo: robot le ṣe afihan ipo iṣiṣẹ ti gbogbo eto roboti nipasẹ pendanti ikọni, pẹlu ipo iṣẹ ṣiṣe eto, awọn ayipada paramita ilana alurinmorin, awọn ayipada paramita eto, ipo lọwọlọwọ ti robot, awọn igbasilẹ itan ipaniyan, awọn ifihan agbara aabo, awọn igbasilẹ itaniji, ati bẹbẹ lọ, ki awọn alabara le ṣe. loye akoko ti eto robot ati ṣe idiwọ awọn iṣoro ni ilosiwaju.
Awọn faili igbewọle/jadeAwọn faili eto roboti ati awọn faili eto ninu eto robot le wa ni ipamọ sinu kaadi SD inu oluṣakoso Robot, ati pe o tun le fipamọ si ohun elo ita.Awọn eto ti a kọ nipasẹ sọfitiwia siseto aisinipo tun le ṣe kojọpọ sinu oluṣakoso Robot, Eyi ṣe iranlọwọ fun awọn alabara ṣe afẹyinti awọn faili eto nigbagbogbo, Ni kete ti iṣoro kan ba wa ninu eto roboti, Awọn afẹyinti wọnyi le ṣe atunṣe lati yanju awọn iṣoro ti roboti.
7, Ifihan ti Awọn ohun elo HY1006A-145 jẹ robot iṣẹ-giga pẹlu iṣẹ oye.O dara fun alurinmorin aabo gaasi ati awọn ohun elo gige.Awọn abuda rẹ jẹ iwuwo ina ati eto iwapọ.
Fun awọn ohun elo alurinmorin arc, Honyen ti ṣe apẹrẹ iwuwo ina ni aṣeyọri ati apa iwapọ, eyiti kii ṣe idaniloju igbẹkẹle atilẹba nikan, ati tun mọ iṣẹ ṣiṣe idiyele to dara julọ.
Honyen gba imọ-ẹrọ servo to ti ni ilọsiwaju julọ, eyiti o le mu iyara išipopada dara ati deede ti robot, dinku laja oniṣẹ, ati ilọsiwaju iṣẹ ṣiṣe fun alurinmorin aabo gaasi ati gige.
| Axis | Isanwo | Atunṣe | Agbara agbara | Ayika | Iwọn | Fifi sori ẹrọ |
| 6 | 10 | 0.08 | 6.5KVA | 0 ~ 45℃20 ~ 80% RH(Ko si ọriniinitutu) | 300kg | Ilẹ / Aja |
| Ibiti išipopada J1 | J2 | J3 | J4 | J5 | J6 | IP ipele |
| ± 170° | +80°~-150° | +95°~-72° | ± 170° | +115°~-140° | ±220° | IP54/IP65(ọwọ) |
| Iye ti o ga julọ ti J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/s | 145°/s | 140°/s | 217°/s | 172°/s | 500°/s |
Ni wiwo iṣẹ Kannada ni kikun ati pe o le yipada si Gẹẹsi pẹlu iṣẹ ṣiṣe keyboard ni kikun
Ṣe atilẹyin ọpọlọpọ awọn ibaraẹnisọrọ pẹlu wiwo I / O, Modbus, Ethernet ati bẹbẹ lọ.
Ṣe atilẹyin awọn asopọ pẹlu awọn roboti pupọ ati awọn ohun elo ita miiran
Nla iwọn lo ri iboju ifọwọkan
Tunto ẹrọ egboogi-ijamba, aabo apa robot ati dinku kikọlu
Robot išipopada Iṣakoso pese ti aipe ona igbogun
Awọn ọgọọgọrun ti awọn baagi iṣẹ ti a ṣe sinu ati awọn iṣẹ ṣiṣe siseto simplify
Nipasẹ kaadi SD, o rọrun lati ṣe afẹyinti ati daakọ data
Olupolowo

Honyen Head-tail ė support positioner eyi ti o ti lo lati yi workpiece, ifọwọsowọpọ pẹlu robot, de ọdọ kan ti o dara ipo fun alurinmorin ati ki o se aseyori ti o dara alurinmorin išẹ
Alurinmorin Power orisun

Megmeet Ehave cm 500h / 500/350 jara kikun ẹru ile-iṣẹ oni nọmba ni kikun * CO2 / MAG / MMA ẹrọ alurinmorin oye
8. Fifi sori, Ifiranṣẹ ati Ikẹkọ
Ṣaaju ifijiṣẹ, eto robot yoo pejọ ati idanwo iṣẹ ni kikun ni ile-iṣẹ wa.Onibara yoo fi awọn ẹya wọn ranṣẹ si ile-iṣẹ wa fun alurinmorin idanwo ati gbigba iṣaaju ṣaaju ifijiṣẹ.Lakoko gbigba ṣaaju, awọn oniṣẹ alabara yoo gba ikẹkọ imọ-ẹrọ akọkọ.
Eto fifi sori ẹrọ ati awọn ibeere imọ-ẹrọ yoo wa silẹ si alabara awọn ọjọ 15 ṣaaju fifi sori ẹrọ, ati alabara yoo ṣe awọn igbaradi akoko ni ibamu si awọn ibeere.Ile-iṣẹ wa yoo firanṣẹ awọn onimọ-ẹrọ lati ṣe fifi sori ẹrọ ati fifisilẹ eto ni aaye olumulo.Labẹ ipo ti alabara ṣe idaniloju awọn iṣẹ iṣẹ ṣiṣe to to, akoko lati ifiṣẹ siseto, ikẹkọ eniyan si iṣelọpọ idanwo ibi-ẹjọ ko ni kọja awọn ọjọ 10.Ile-iṣẹ wa kọ awọn olumulo ti siseto eto roboti, iṣẹ ṣiṣe ati itọju fun awọn alabara, ati pe awọn olukọni yẹ ki o ni imọ ipilẹ kọnputa kan.
Lakoko fifi sori ẹrọ ati fifisilẹ, alabara yoo pese awọn irinṣẹ pataki, gẹgẹbi ohun elo gbigbe, forklift, awọn kebulu, lilu ipa, ati bẹbẹ lọ, ati pese iranlọwọ igba diẹ lakoko gbigbe ati fifi sori ẹrọ.
Ile-iṣẹ wa ni iduro fun itọnisọna, fifi sori ẹrọ, fifisilẹ ohun elo ati ikẹkọ ti oniṣẹ.Ile-iṣẹ wa ni iduro fun itọju ati ikẹkọ iṣẹ.Oniṣẹ yoo ṣiṣẹ ati ṣetọju ohun elo lori ara wọn.Awọn akoonu ikẹkọ: ipilẹ eto ohun elo, laasigbotitusita itanna ti o wọpọ, ifihan si awọn ilana siseto ipilẹ, awọn ọgbọn siseto ati awọn ọna siseto ti awọn ẹya aṣoju, ifihan ati awọn iṣọra ti nronu iṣiṣẹ ohun elo, adaṣe iṣẹ ohun elo, bbl
9. Ṣayẹwo ati gbigba
Gbigba iṣaaju ni a ṣe ni ile-iṣẹ wa pẹlu ikopa ti awọn oṣiṣẹ ti o yẹ ti ẹgbẹ mejeeji.Lakoko gbigba-ṣaaju, awọn iṣẹ-ṣiṣe yoo ni idanwo ni ibamu si deede ti iṣẹ ṣiṣe ti a pese nipasẹ alabara, iṣẹ-ṣiṣe ti o peye nikan ni yoo ṣe alurinmorin, ati ijabọ idanwo gbigba-tẹlẹ ni yoo gbejade.Lẹhin igbasilẹ ipari, Robot yoo wa ni jiṣẹ.Ni ibere lati rii daju gbigba-tẹlẹ, 3 workpieces yoo wa ni pese fun deede gbóògì.
10.Awọn ibeere Ayika Awọn ibeere aabo: gaasi ati awọn ẹya apoju ti awọn olumulo lo gbọdọ wa ni ibamu pẹlu awọn iṣedede orilẹ-ede to wulo.
Orisun afẹfẹ yẹ ki o ṣeto ni ita, ko kere ju 15m kuro lati ina, ati pe ko kere ju 15m kuro lati gaasi ati atẹgun.Orisun afẹfẹ yẹ ki o ṣetọju awọn ipo atẹgun ti o dara ati ki o wa ni ibi ti o tutu kuro lati afẹfẹ.
Gbogbo awọn iyika gaasi gbọdọ wa ni ṣayẹwo ṣaaju lilo roboti.Ti jijo afẹfẹ ba wa, o gbọdọ ṣe atunṣe lati rii daju pe ko si aṣiṣe.
nigbati o ba n ṣatunṣe titẹ ati iyipada silinda gaasi, oniṣẹ kii yoo ni awọn nkan epo ni ọwọ rẹ.
ọriniinitutu ibaramu: ni gbogbogbo, ọriniinitutu ibaramu jẹ 20% ~ 75% RH (ti ko ba si isunmọ);Igba kukuru (laarin oṣu 1) o kere ju 95% RH (awọn iṣẹlẹ laisi condensation).
Afẹfẹ fisinuirindigbindigbin: 4.5 ~ 6.0 kgf / cm2 (0.45-0.6mpa), àlẹmọ epo ati omi, ≥ 100L / min
Ipilẹ: agbara nja to kere julọ jẹ C25, ati sisanra ti o kere julọ ti ipilẹ jẹ 400 mm
gbigbọn: yago fun orisun gbigbọn
ipese agbara: ipese agbara ti gbogbo ẹrọ itanna ti a ṣelọpọ ati ẹrọ itanna gba 50Hz (± 1) ati 380V (± 10%) folti AC mẹta-mẹta lati rii daju ipilẹ ipilẹ akọkọ ti ipese agbara.
Awọn iṣẹ lori aaye ti awọn onibara pese:
gbogbo awọn igbaradi pataki ṣaaju ifijiṣẹ, gẹgẹbi ipilẹ, iṣẹ alurinmorin pataki, titunṣe awọn irinṣẹ iranlọwọ, ati bẹbẹ lọ.
unloading ati transportation ni onibara ká ojula.
11. Atilẹyin ọja ati Lẹhin ti sale iṣẹ Akoko atilẹyin ọja ti orisun agbara weld jẹ oṣu 12.
Akoko atilẹyin ọja ti ara robot jẹ oṣu 18.
Ni ọran ti ikuna tabi ibajẹ labẹ lilo deede ati ohun elo wa laarin akoko atilẹyin ọja, ile-iṣẹ wa le tun tabi rọpo awọn ẹya laisi idiyele EXW (laisi awọn ohun elo, awọn ọja itọju, awọn tubes ailewu, awọn ina atọka ati awọn ohun elo miiran ti o jẹ pataki nipasẹ ile-iṣẹ wa).
Fun awọn ẹya ti o ni ipalara laisi atilẹyin ọja, ile-iṣẹ wa ṣe ileri igbesi aye iṣẹ deede ati iye owo ipese ti awọn ẹya ti o ni ipalara, ati awọn ohun elo ni ikanni ipese ti o ni iduroṣinṣin ti ohun elo fun ọdun marun.
Ni akoko atilẹyin ọja, ile-iṣẹ wa yoo tẹsiwaju lati pese iṣẹ isanwo igbesi aye ati pese atilẹyin imọ-ẹrọ okeerẹ ati awọn ẹya ẹrọ ti o nilo.
12. Ifijiṣẹ So Iwe Awọn iyaworan fifi sori ẹrọ: awọn yiya ikole ipilẹ ohun elo ati awọn iyaworan fifi sori ẹrọ
◆ awọn aworan apẹrẹ: imuduro ati awọn iyaworan ẹrọ
◆ Afọwọṣe: Afowoyi iṣiṣẹ ohun elo, itọnisọna itọju ati ilana iṣiṣẹ robot
◆ awọn ẹya ẹrọ: atokọ ifijiṣẹ, ijẹrisi ati kaadi atilẹyin ọja.



